
中欧官网appZigBee技术智能化控制城市LED路灯系统解析
发布时间:2024-12-23 06:37:41 来源:zoty中欧登录入口 作者:zoty中欧体育平台
是城市公共设施的重要组成部分,目前国内的道路照明系统大部分没有采用网络化监控管理,只能以区域为单位对照明设备进行简单的开关灯控制,多数城市路灯的开关控制仍由传统变压器(配电箱)分散控制,不能对路灯进行有效监控,缺乏灵活多变的操作系统,因此存在着一系列的问题:如系统复杂,难以统一管理;路灯覆盖面广,维护困难;开关控制效率低,电能浪费严重等。针对目前城市对路灯照明控制和管理水平的不足,笔者设计了一套路灯无线监控系统,能对城市路灯实现智能化控制并有效节约电能。本系统主要分为三层,分别是具有人机交互界面功能的路灯管理中心、汇聚路灯节点信息和发送路灯控制命令的路灯监控子站以及采集路灯节点信息的路灯控制终端。采用GPRS通信和ZigBee无线通信相结合的技术手段,取代了传统的有线传输。其中,路灯管理中心和路灯监控子站之间的通信采用GPRS技术,具有覆盖范围广、传输速率高的特点,且能实现远程异地操作;路灯监控子站和路灯控制终端以及路灯控制终端之间的通信采用ZigBee技术。
本设计采用GPRS技术与ZigBee技术相结合的方案,结合两者的优点,既节约成本,又降低了系统的复杂度。系统采用“路灯管理中心一一路灯监控子站一一路灯控制终端”三层模式结构,实现对路灯的远程控制操作。其中,路灯管理中心与路灯监控子站之间的通信采用GPRS技术,路灯监控子站与路灯控制终端以及路灯控制终端之间的通信采用ZigBee技术。系统操作的对象是城市道路成千上万盏路灯,通过管理系统,负责监测路灯的各项运行状况,如监测当前路灯节点的电压、电流、功率等指标是否符合规范,并且能实现对路灯开关的简单控制。整个路灯监控系统结构图如图1所示。
ZigBee网络拓扑结构可分为三类:网状结构、星型结构和树状结构。经过对ZigBee网络拓扑结构的分析,考虑到路灯监控覆盖范围面广,所处的自然环境易受天气、障碍物和电磁辐射等的影响,难免会出现终端节点失效的情况,星形网络和树形网络都不宜采用。因此,本系统采用网状形ZigBee网络,它具备较大的通信范围,能实现路由发现的功能,当网络出现故障时,能自动修复实现愈合,从而大大提高了整个监控系统的稳定性和可靠性,使用路由功能传输。网络结构如图2所示。
在一个路灯无线监控系统中,包含有多个ZigBee网络,一条街道附近区域的路灯就组成一个ZigBee网络。由于路灯均匀分布于道路两旁,且每两盏灯的间距一般为25~30m。所以,本系统首先要选取一个合适的地点安置ZigBee网络协调器,在ZigBee网络中,由ZigBee网络协调器负责建立网络,通常情况下,用ZigBee网络协调器实现路灯监控子站的功能,负责维护街道上路路灯节点的运行状况。路由节点加入到网络后,路灯监控系统中控制终端的角色。实际应用中,为了方便管理,每一个路灯控制终端只能加入一个ZigBee网络,实现单灯控制。当所有的路由器节点都成功加入网络后,协调器根据网状形网络拓扑结构为路由节点分配网络地址。
ZigBee协调器主要由GPRS通信单元、微处理器、通信单元和电源模块组成。协调器负责组建ZigBee网络,实现信息的收发处理工作,需要不断地采集监控中心发来的各种指令下达给控制终端,同时将终端及线路信息反馈给监控中心。模块结构图如图3所示。处理器使用基于ARM7的微处理器模块,通过串口TTL电平和GPRS通信模块进行数据传递,通过SPI串口连接通信模块,电源模块通过220V交流转换为5V为处理器、GPRS通信模块和通信模块供电。通信模块采用TI公司的ZigBee射频芯片cc2530,主要技术指标包括:工作频段为2.4GHz;信道为16个;发射功率为4.5dBm;接收灵敏度为-97dBm。
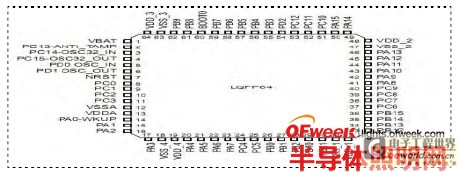
在路灯控制终端中,它的硬件组成部分主要包括MCU微单元、电压电流等信息监测单元、射频模块单元、LED路灯驱动控制单元和电源模块。其硬件结构如图4所示。作为路灯控制终端设备的CPU,要完成与射频模块的通信、数据包收发的处理和存储等功能,除要求MCU微具有足够的存储空间外,还要具有强大的数据处理能力。本文采用意法半导体公司生产的ARM Cortex-M3内核的32位系列单片机,型号为STM32F103RBT6,采用LQFP(轻薄方型扁平式)封装结构,有64个管脚,外观大小只有l0mmXl0mm,价格在10元一20元人民币之间。供电电压为2-3.6V,一般采用3.3V供电,具有2个12位模数转换器,支持7通道的DMA。模块引脚图如图5所示。
图5中,MCU共有三个串口,分别是UART1,UART2和UART3,用来实现和其他模块之间的通信。管脚42和43作为DART 1串口的发送和接收引脚,与GPRS模块相连,从而实现CPU和GPRS模块之间的通信,这种连接方式主要针对监控子站设备,而路灯控制终端设备并不连接GPRS模块。管脚16和17作为UART2串口的发送和接收引脚,与射频模块相连接,从而实现CPU和射频模块之间的通信。管脚29和30作为UART3串口的接收和发送引脚,主要实现RS485通信,与LED控制板相连接,从而实现CPU对LED控制板的驱动。MCU的14管脚作为RS485的使能信号,与485转换芯片相连接,根据接收到的485通信协议,实现对LED驱动控制板作为收发转换设备的处理。MCU的15管脚输出PWM信号,调节电流大小,从而实现对LED路灯的亮度调节。MCU的管脚21和22连接至检测单元的安全门接口,用来实现防盗报警的功能。4.软件设计
本文采用MDK作为嵌入式系统开发的编译环境,支持ARM7架构的Cortex-M3内核处理器,自动配置启动代码,集成Flash烧写模块、具有强大的Simulation设备模拟、性能分析功能。本系统无线传感网络的软件层分为三个层次:硬件抽象层、系统服务层和应用层。
其中,硬件抽象层移植了COS-Ⅱ嵌入式实时操作系统,为上层屏蔽了硬件细节,同时为硬件单元如电源模块、MCU微处理器模块和射频通信模块等提供了驱动程序。系统服务层主要实现操作系统的任务调度功能,通过修改OS_CPU_A.S档,用汇编语言实现CPU的开/关中断和任务的切换,并且支持传输通信协议,完成路由算法的实现。应用层主要根据使用者的定义,实现上位机软件的设计功能。
本文根据数据流传输方向的不同,把数据传输分为上报和下发。上报是指路灯控制终端通过射频模块发送数据到达路灯监控子站,最终由路灯监控子站通过GPRS传输至路灯管理中心;所谓下发是指路灯管理中心发出的命令通过GPRS传输至路灯监控子站,再由路灯监控子站发送至需要执行操作命令的路灯控制终端。
如图6所示为系统主程序流程图。节点一旦上电,首先完成初始化操作,主要包括MCU控制模块的通用I/O口、串口、定时器以及射频模块的初始化配置等。接着初始化操作系统,当执行操作系统后,系统就进入了一个无限循环状态,初始化时,为了减少节点的功率损耗,每个节点都进入休眠状态。当中断产生时,就触发了待要执行的任务,这时,CPU会为该任务分配资源,并执行相应的通信服务子程序。例如,协调器收到了来自路灯管理中心发送的命令,代表协调器收到了一个中断请求,节点从休眠状态被启动,执行通信服务子程序,接收来自管理中心下发的数据包,当接收数据完成后,还要对数据进行校验,如果校验失败,则丢弃该帧;否则,还要继续判断是否是发送给自己的数据包,如果不是,协调器需要将该数据包转发出去,接着协调器节点会从接收状态变成发送状态,等发送成功后,会产生中断请求,并再次进入休眠状态,等待下一次节点状态的启动。
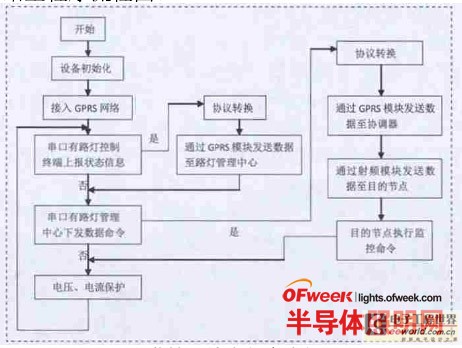
路灯监控子站不仅要与路灯管理中心建立GPRS网络,还要与路灯控制终端建立ZigBee网络,在路灯监控子站节点上,既装有GPRS通信模块,又搭载了射频模块。当自身设备的MCU初始化完成后,通过串口对GPRS模块进行初始化,按照GPRS协议接入GPRS网络,接着进入了主程序循环任务。首先扫描ZigBee网络通信信道,当ZigBee网络通信链路成功后,依据网络协议进行数据传输。如图7所示为路灯监控子站主程序流程图。
在图7中,监控子站初始化完成后,进入了系统主程序的循环任务中,任务循环的主要功能就是监测MCU串口上是否有数据上报和下发。当串口UART 1收到来自路灯管理中心的监控命令后,监控子站经过协议转换,通过射频模块路由至目的节点,目的节点收到监控命令时执行操作。当串口UART2收到来自路灯控制终端上报的节点状态信息时,监控子站经协议转换,通过GPRS网络把数据发送至路灯管理中心,下发监控命令,完成对路灯节点的开/关操
中欧官网app





地址:广州市天河区华观路1933号万科云城A栋10楼 邮编:510640 电话:020-66813818
©2020 中欧官网app(VIP)·zoty中欧体育平台登录入口版权所有 中欧官网app